









Adafruit N20 DC-motor med magnetisk encoder - 6V med 1:298 gearforhold
Beskrivelse
Det første trin i et robotprojekt er at få en motor til at dreje. Ikke alle motorer drejer med samme hastighed på grund af variationer i spænding, miljø og fremstilling. Bestemmelse af motorhastighed involverer brug af et encoderhjul med en optisk eller magnetisk tæller til at tælle rotationer.
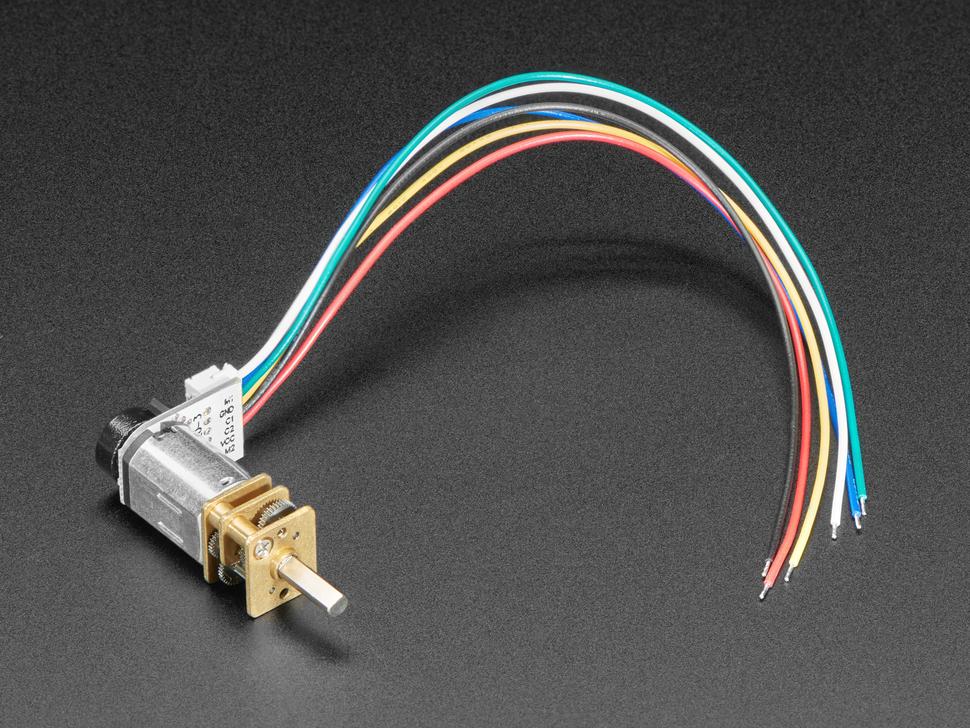
Denne motor forenkler processen med et monteret magnethjul og to hall-effektsensorer, hvilket eliminerer kompleks ledningsføring. Den er kompakt, passer til standard N20-størrelsen og fungerer effektivt med 4,5 til 6V DC. Forbindelserne er ligetil: hvide og røde ledninger til motorstyring, PWM-understøttelse til hastighedsjustering, blå ledning til jord og sort ledning til strøm. De gule og grønne ledninger giver encoderudgange.
Et eksempel på Arduino skitse er tilgængelig, som kan tilpasses andre sprog, til afbrydelsestælling og hastighedsberegning ved hjælp af et gearforhold på 1:298. Motoren bruger 6V nominel effekt og trækker omkring 100 mA (200 mA ved stall), og variation i gearforholdet påvirker drejningsmoment og omdrejninger, ikke strømforbrug.
Ejendomme
| Mærke | Adafruit |
| Model | 4641 |
Leveret i 10 til 12 dage
 Adafruit N20 DC-motor med magnetisk encoder - 6V med 1:298 gearforhold Leveret i 10 til 12 dage € 20,35
Adafruit N20 DC-motor med magnetisk encoder - 6V med 1:298 gearforhold Leveret i 10 til 12 dage € 20,35 Kundespørgsmål
kunde anmeldelser
- Reduceret På lager -50 % Adafruit NOOds - Fleksibel LED Filament - 3V 300mm lang - Rød € 10,95 € 5,50 Se produkt
- Reduceret På lager -49 % Adafruit Stablende headere til Feather - 12-bens og 16-bens hun-headere € 1,85 € 0,95 Se produkt
- Reduceret På lager -50 % Adafruit SCD-41 - Ægte CO2 temperatur- og fugtighedssensor € 72,95 € 36,50 Se produkt
- Reduceret På lager -50 % Adafruit NOOds - Fleksibel LED Filament - 3V 300mm lang - Gul € 10,95 € 5,50 Se produkt
- Reduceret På lager -49 % Adafruit Mini Metal Højttaler m/ Ledninger - 8 ohm 0,5W € 2,85 € 1,45 Se produkt
- Reduceret På lager -50 % Adafruit Hook-up trådspolesæt - 22AWG Stranded-Core - 6 x 25 fod € 29,15 € 14,60 Se produkt
- Reduceret På lager -49 % Adafruit Vandtæt polariseret 4-leder kabelsæt € 3,65 € 1,85 Se produkt
- Reduceret På lager -49 % Adafruit Sammenføjelsesfri Prespasnings Han Pin-stik - 2.54mm / 0.1" afstand € 2,85 € 1,45 Se produkt
- Reduceret 10 pieces På lager -50 % Adafruit Break-away 0,1" 36-bens strimmel han-header - Sort - 10 stk € 7,25 € 3,65 Se produkt
- Reduceret På lager -51 % Adafruit IR-brydestrålesensorer med premium ledningshovedender - 3 mm LED'er € 4,35 € 2,15 Se produkt
- Reduceret På lager -51 % Adafruit Hvidt LED-baggrundsbelysningsmodul - Stort 45mm x 86mm € 4,35 € 2,15 Se produkt
- Reduceret På lager -49 % Adafruit Højttaler - 3" Diameter - 4 Ohm 3 Watt € 2,85 € 1,45 Se produkt
- Reduceret På lager -50 % Adafruit Højttaler - 40 mm diameter - 4 ohm 5 watt € 7,25 € 3,65 Se produkt
- Reduceret På lager -50 % Adafruit Electret mikrofonforstærker - MAX4466 med justerbar forstærkning € 10,15 € 5,10 Se produkt
- Reduceret På lager -49 % Adafruit Mini Basic PIR Sensor - BL412 € 2,85 € 1,45 Se produkt