









Pololu Dual G2 High-Power Motor Driver 18v18 til Raspberry Pi (samlet)
Beskrivelse Venstre Vedhæftede filer
Dette tilføjelseskort gør det nemt at styre to højeffekt DC-motorer med en Raspberry Pi. Dens dobbelte, diskrete MOSFET H-broer understøtter et bredt 6,5 V til 30 V driftsområde og er effektive nok til at levere en kontinuerlig 18 A uden en køleplade. Driverne tilbyder grundlæggende strømbegrænsende funktionalitet, og de accepterer ultralyds PWM-frekvenser for mere støjsvag drift. Standardpin-tilknytningerne gør det nemt at komme i gang, men de kan tilpasses til mere specialiserede applikationer. Denne version sendes fuldt samlet med stik loddet ind.
Den mindste driftsspænding for alle fire versioner er 6,5 V, mens de maksimale driftsspændinger er angivet i ovenstående tabel. Boardet inkluderer også en integreret 5 V, 2,5 A switching step-down regulator, der kan bruges til at forsyne den Raspberry Pi den er tilsluttet, hvilket muliggør drift fra en enkelt strømforsyning.
Driverens standardkonfiguration bruger seks GPIO-ben til at styre motordriverne ved at bruge Raspberry Pi's hardware PWM-udgange, og den bruger to ekstra ben til at læse statusoutput fra driverne. Pin-tilknytningerne kan dog tilpasses, hvis standardindstillingerne ikke er praktiske, og ben til strømregistrering og begrænsning er tilgængelige på tavlen til mere avancerede applikationer.
Boardet matcher Raspberry Pi HAT (Hardware Attached on Top) mekaniske specifikation, selvom det ikke er i overensstemmelse med de fulde HAT-specifikationer på grund af manglen på en ID EEPROM. (Et fodaftryk til tilføjelse af din egen EEPROM er tilgængelig for applikationer, hvor en ville være nyttig; pull-ups på SDA, SCL og WP er tilvejebragt.) Det er ikke praktisk at bruge dette udvidelseskort med den originale Raspberry Pi Model A eller Model B på grund af forskelle i deres pinout og formfaktor.
Disse dobbeltmotoriske drivere fås også som Arduino-skjolde. For enkeltkanalsversioner i en mere kompakt formfaktor skal du overveje vores højeffektmotordrivere. For mindre, lavere effekt og billigere alternativer designet til en Raspberry Pi, overvej vores Dual MC33926 Motor Driver til Raspberry Pi, Dual MAX14870 Motor Driver til Raspberry Pi og DRV8835 Dual Motor Driver til Raspberry Pi.
Funktioner, der er fælles for alle versioner
- PWM-drift op til 100 kHz
- Motorindikator-LED'er viser, hvad udgangene gør, selv når ingen motor er tilsluttet
- Integreret 5 V, 2,5 A switching step-down spændingsregulator driver Raspberry Pi basen til drift med enkelt forsyning
- Python bibliotek gør det nemt at komme i gang med at bruge dette board som et motordriverudvidelseskort
- GPIO pin mappings kan tilpasses, hvis standard mappings ikke er praktiske
- Strømfølende og -begrænsende stifter er blotlagt til avanceret brug
- Omvendt spændingsbeskyttelse
- Underspændingsafbrydelse
- Kortslutningsbeskyttelse
Detaljer for denne vare #3751
- Driftsspænding: 6,5 V til 30 V (absolut maksimum; ikke beregnet til brug med 24 V-batterier)
- Udgangsstrøm: 18 A kontinuerlig
- Aktiv strømbegrænsning (hakning) med omtrentlig standardtærskel på 50 A (kan justeres lavere)
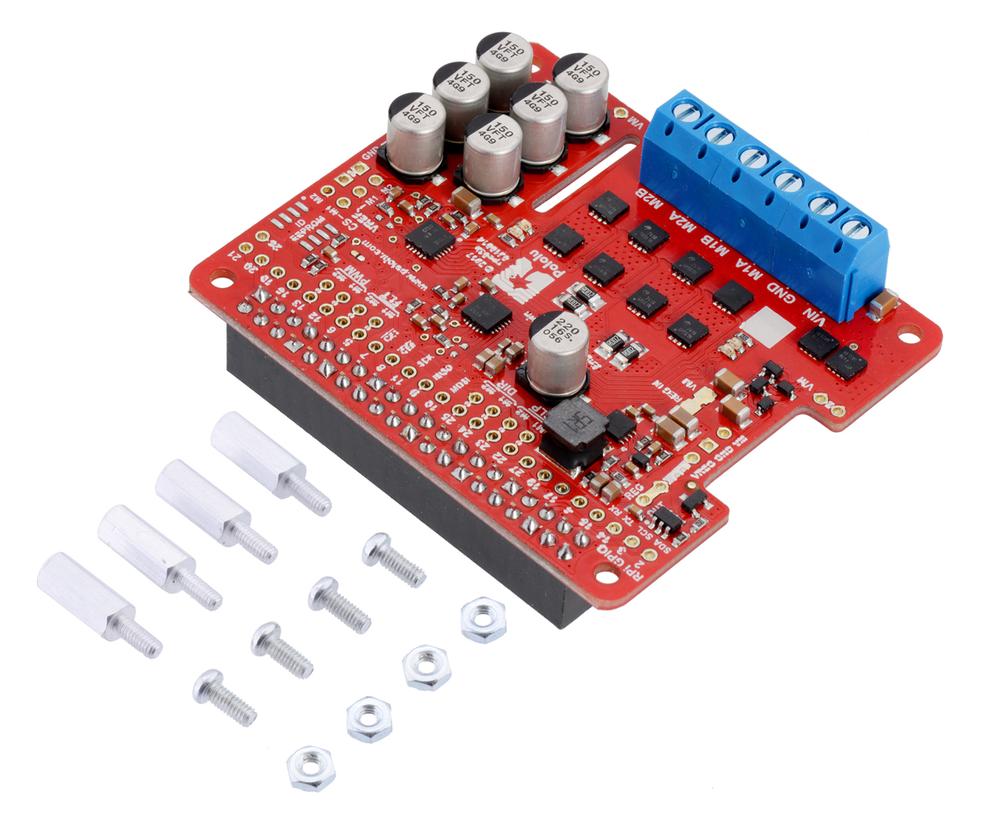
Denne version af 18v18 motorkører er færdigmonteret, med en 2×20-benet 0,1″ hun-header (til Raspberry Pi-grænsefladen) og en seks-benet strimmel af 5 mm klemrækker (til kortstrøm og motorudgange) loddet ind. Den kan skelnes fra de andre versioner ved at dens rød PCB og nummeret 150 oven på de seks høje sølvelektrolytiske kondensatorer i hjørnet af brættet. (Se vare #3750 for en kitversion med stik inkluderet, men ikke loddet ind.)
Fire M2.5-standoffs (11 mm længde), skruer og møtrikker er inkluderet for at fastgøre kortet til Raspberry Pi i den rigtige højde for GPIO-stikket.
Kortslutningsblokke og 0,1" han-headers (medfølger ikke) kan bruges til at lave nogle af de mere avancerede valgfrie modifikationer til boardet, såsom at omkorte kontrolstifterne.
Motordriveren inkluderer seks 100 μF eller 150 μF elektrolytiske strømkondensatorer, og der er plads til at tilføje yderligere kondensatorer (f.eks. for at kompensere for lange strømledninger eller øge stabiliteten af strømforsyningen). Yderligere strømkondensatorer er normalt ikke nødvendige, og der følger ingen ekstra kondensatorer med denne motordriver.
En Raspberry Pi er ikke inkluderet.
Strøm
En passende motorstrømforsyning skal tilsluttes til motordriverens store VIN- og GND-puder. Kortet inkluderer et omvendt spændingsbeskyttelseskredsløb, der hjælper med at forhindre beskadigelse i tilfælde af, at motorens strømforsyning tilsluttes bagud. Den omvendt-beskyttede indgangsspænding kan tilgås til brug i andre kredsløb gennem de to ben mærket VM på venstre side af kortet. Som standard forsyner motorens strømforsyning også en 5 V, 2,5 A skiftende step-down regulator, der leverer strøm til den tilsluttede Raspberry Pi.
Et ideelt diodekredsløb på dette kort forhindrer omvendt strøm i at strømme ind i motordriverkortets 5 V-forsyning, hvis Raspberry Pi'en får separat strøm (for eksempel gennem dens USB-strømstik). Startende med Raspberry Pi 3 Model B+ er der dog ikke noget tilsvarende ideelt diodekredsløb på Raspberry Pi's USB-strømindgang, så det er muligt for driverkortet at tilbageføde en USB-strømadapter gennem Raspberry Pi. Som følge heraf anbefaler vi ikke at tilslutte ekstern USB-strøm til Raspberry Pi, mens den får strøm fra motordriveren.
Backfeeding er ikke et problem med ældre Raspberry Pi-versioner, som har et diodekredsløb på USB-strømindgangen. Med Raspberry Pi-versioner før Pi 3 B+ er det sikkert at have en anden strømforsyning tilsluttet til Raspberry Pi via dens USB-stik, mens motordriveren er tilsluttet og strømforsynet.
Hvis du vil forsyne Raspberry Pi separat, kan regulatoren afbrydes ved at skære to synlige spor på brættet: en mellem de overflademonterede puder mærket "VM" og "REG IN", og en anden mellem de to ben med " REG OUT”, som vist til højre. På versionerne 24v14 og 24v18 øger afbrydelse af regulatoren den absolutte maksimale driftsspænding på kortet til 40 V.
Muligheder for motorstyring
Med PWM-stiften holdt lav, vil begge motorudgange blive holdt lave (en bremseoperation). Med PWM høj vil motorudgangene blive drevet i henhold til DIR-indgangen. Dette tillader to driftsformer: fortegn-størrelse, hvor PWM-driftscyklussen styrer motorens hastighed, og DIR styrer retningen, og låst-modfase, hvor et pulsbredde-moduleret signal påføres DIR-stiften med PWM holdt højt.
Ved låst modfasedrift driver en lav driftscyklus motoren i den ene retning, og en høj driftscyklus driver motoren i den anden retning; en 50 % driftscyklus slukker motoren. En vellykket låst-modfaseimplementering afhænger af, at motorinduktansen og koblingsfrekvensen udjævner strømmen (f.eks. gør strømmen nul i 50 % duty cycle tilfældet), så en høj PWM-frekvens kan være påkrævet.
PWM frekvens
Motordriveren understøtter PWM-frekvenser så høje som 100 kHz, men bemærk, at koblingstab i driveren vil være proportional med PWM-frekvensen. Typisk er omkring 20 kHz et godt valg til fortegnsstørrelsesdrift, da den er høj nok til at være ultralyd, hvilket resulterer i mere støjsvag drift.
En impuls på PWM-stiften skal være høj i en minimumsvarighed på ca. 0,5 µs, før udgangene tændes i den tilsvarende varighed (enhver kortere indgangsimpuls producerer ikke en ændring på udgangene), så lave arbejdscyklusser bliver utilgængelige ved høje frekvenser . For eksempel ved 100 kHz er pulsperioden 10 µs, og den mindste opnåelige driftscyklus, der ikke er nul, er 0,5/10 eller 5%.
Fejlforhold
Motorføreren kan registrere flere fejltilstande, som den rapporterer ved at køre FLT-stiften lav; dette er en åben-drain-udgang, der skal trækkes op til dit systems logiske spænding. De påviselige fejl omfatter kortslutninger på udgangene, underspænding og overtemperatur. Alle fejlene deaktiverer motorudgangene, men er ikke låst, hvilket betyder, at føreren vil forsøge at genoptage driften, når fejltilstanden er fjernet (eller efter en forsinkelse på et par millisekunder i tilfælde af kortslutningsfejl). Overtemperaturfejlen giver en svag indikation af, at kortet er for varmt, men det indikerer ikke direkte temperaturen på MOSFET'erne, som normalt er de første komponenter, der overophedes, så du skal ikke regne med, at denne fejl forhindrer skader fra over -temperaturforhold.
Gentilpasning af stifter
Alle Raspberry Pi's GPIO-ben er brudt ud langs en række af nummererede gennemgående huller lige under 40-bens GPIO-stikket. Hver GPIO-ben, der bruges af kortet, er forbundet fra denne række til den tilsvarende motordriver-stift ved hjælp af et spor på oversiden af kortet, der strækker sig over hullerne. Hvis du ønsker at omforme en af disse motordriverstifter, kan du skære dens spor med en kniv og derefter føre en ledning fra det nederste hul til en ny GPIO-stift.
Bemærk, at standardpin-mappingerne blev valgt, så Raspberry Pi's standard GPIO pull-ups og pull-downs matcher den retning, motordriverens ben er eller skal trækkes (op for SF, ned for andre); hvis du omformer motordriverens stifter uden at være opmærksom på dette, kan du støde på problemer med stifterne, der trækkes den forkerte vej. Se den Raspberry Pi dokumentation for mere om standard GPIO-tilstandene.
Strømføling og begrænsning
Motordriveren afslører strømfølende og begrænsende ben, der ikke er forbundet til Raspberry Pi, men de er tilgængelige gennem deres egne gennemgående huller, hvis du vil bruge dem i en mere avanceret applikation.
Føreren har evnen til at begrænse motorstrømmen gennem strømafbrydelse: når motorens drivstrøm når en indstillet tærskel, går føreren i bremsetilstand (langsomt henfald) i omkring 25 μs, før den tilfører strøm til at drive motoren igen. Dette gør det mere praktisk at bruge driveren med en motor, der måske kun trækker et par ampere, mens den kører, men som kan trække mange gange så mange gange (tiere af ampere) ved start.
På dette kort (18v18) er den nominelle strømbegrænsende tærskel sat til omkring 50 A som standard. For hver motorkanal kan du sænke grænsen ved at tilslutte en ekstra modstand mellem VREF-benet og det tilstødende GND-ben; grafen nedenfor viser, hvordan strømgrænsen forholder sig til VREF-modstandsværdien. Tilføjelse af en 100 kΩ modstand mellem VREF og GND sænker f.eks. strømgrænsen til ca. 29 A. Bemærk, at den strømbegrænsende tærskel ikke er særlig præcis og er mindre nøjagtig ved særligt lave indstillinger (angivet med den stiplede del af kurven). .
Driverens strømfølende ben, mærket CS, udgangsspændinger proportionale med motorstrømmene, mens H-broerne kører. Udgangsspændingen for denne version er omkring 20 mV/A plus en lille offset, som typisk er omkring 50 mV.
Hver CS-udgang er kun aktiv, mens den tilsvarende H-bro er i køretilstand; den er inaktiv (lav), når kanalen er i bremsetilstand (langsomt henfald), hvilket sker, når PWM-indgangen er lav, eller når strømbegrænsning er aktiv. Strøm vil fortsætte med at cirkulere gennem motoren, når føreren begynder at bremse, men spændingen på CS-stiften vil ikke nøjagtigt afspejle motorstrømmen i bremsetilstand. CS-spændingen bruges internt af motordriveren, så for at undgå at forstyrre driverens drift, bør du ikke tilføje en kondensator til denne pin eller tilslutte en belastning, der trækker mere end et par mA fra den.
Overvejelser om magtspredning i den virkelige verden
MOSFET'erne kan håndtere store strømspidser i korte varigheder (f.eks. 100 A i nogle få millisekunder), og driverens strømhakning vil holde den gennemsnitlige strøm under den indstillede grænse. Spidsværdierne er for hurtige transienter (f.eks. når en motor tændes første gang), og den kontinuerlige vurdering afhænger af forskellige forhold, såsom den omgivende temperatur. PWMing af motoren vil introducere yderligere opvarmning proportionalt med frekvensen. Den faktiske strøm, du kan levere, afhænger af, hvor godt du kan holde motorkøreren kølig. Driverens printkort er designet til at trække varme ud af MOSFET'erne, men ydeevnen kan forbedres ved at tilføje en køleplade eller luftstrøm. Ved højstrømsinstallationer skal motor- og strømforsyningsledningerne også loddes direkte i stedet for at gå gennem de medfølgende klemrækker, som er normeret til op til 16 A.
Advarsel: Denne motordriver har ingen overtemperaturafbrydelse. En overtemperatur eller overstrømstilstand kan forårsage permanent skade til motorkøreren. Du kan overveje at bruge enten driverens integrerede strømsensorudgang (med en ekstern ADC) eller en ekstern strømsensor til at overvåge dit strømtræk.
Ejendomme
| Mærke | Pololu |
| Model | 3751 |
Leveret i 5 til 7 dage
 Pololu Dual G2 High-Power Motor Driver 18v18 til Raspberry Pi (samlet) Leveret i 5 til 7 dage € 104,90
Pololu Dual G2 High-Power Motor Driver 18v18 til Raspberry Pi (samlet) Leveret i 5 til 7 dage € 104,90 Alternative produkter
- Pololu Jrk G2 18v19 USB Motor Controller med Feedback € 152,85 Se produkt
- Pololu High-power enkel motorcontroller G2 24v12 € 187,25 Se produkt
- Pololu Dual G2 High-Power Motor Driver 18v22 Shield til Arduino € 146,- Se produkt
- Pololu Dual G2 High-Power Motor Driver 18v18 Shield til Arduino € 104,90 Se produkt
- Pololu G2 High-Power Motor Driver 24v21 € 80,20 Se produkt
- Pololu Dual G2 High-Power Motor Driver 24v14 Shield til Arduino € 111,75 Se produkt
- Pololu Højeffekt enkel motorcontroller G2 18v15 (konnektorer loddet) € 128,95 Se produkt
- Pololu Jrk G2 18v27 USB Motor Controller med feedback € 136,85 Se produkt
- Pololu Dual G2 High-Power Motor Driver 18v22 til Raspberry Pi (delvis sæt) € 132,30 Se produkt
- Pololu G2 High-Power Motor Driver 18v17 € 63,75 Se produkt
- Pololu Jrk G2 24v13 USB Motor Controller med feedback € 152,85 Se produkt
- Pololu High-power enkel motorcontroller G2 24v19 € 150,70 Se produkt
- Pololu Dual G2 High-Power Motor Driver 24v14 til Raspberry Pi (delvis sæt) € 104,90 Se produkt
- Pololu Dual G2 High-Power Motor Driver 18v18 til Raspberry Pi (delvis sæt) € 98,- Se produkt
- Pololu Dual G2 High-Power Motor Driver 24v18 Shield til Arduino € 146,- Se produkt
- Pololu Højeffekt enkel motorcontroller G2 24v12 (konnektorer loddet) € 128,95 Se produkt
- Pololu High-Power enkel motorcontroller G2 18v15 € 187,25 Se produkt
- Pololu Dual G2 High-Power Motor Driver 24v18 til Raspberry Pi (delvis sæt) € 132,30 Se produkt
- Pololu G2 High-Power Motor Driver 18v25 € 80,20 Se produkt
- Pololu Jrk G2 21v3 USB-motorcontroller med feedback (stik loddet) € 80,20 Se produkt
- Pololu High-power enkel motorcontroller G2 18v25 € 150,70 Se produkt
- Pololu Jrk G2 24v21 USB Motor Controller med feedback € 207,70 Se produkt
- Pololu Dual G2 High-Power Motor Driver 24v14 til Raspberry Pi (samlet) € 111,75 Se produkt
- Pololu G2 High-Power Motor Driver 24v13 € 63,75 Se produkt
Kundespørgsmål
kunde anmeldelser
- Reduceret På lager -50 % Pololu Mini-skydekontakt: 3-benet, SPDT, 0,3A (3-pak) € 3,50 € 1,75 Se produkt
- Reduceret På lager -50 % Pololu DRV8838 Enkelt børstet DC Motor Driver Holder € 7,25 € 3,65 Se produkt
- Reduceret På lager -50 % Pololu Skrueklemmeblok: 2-benet, 0,1" pitch, sideindgang (4-pak) € 5,20 € 2,60 Se produkt
- Reduceret På lager -50 % Pololu 3,3V, 500mA Step-Down spændingsregulator D24V5F3 € 13,10 € 6,55 Se produkt
- Reduceret På lager -50 % Pololu 5V, 500mA Step-Down spændingsregulator D24V5F5 € 13,10 € 6,55 Se produkt
- Reduceret På lager -50 % Pololu 3,3V, 2,6A step-down spændingsregulator D24V22F3 € 27,70 € 13,85 Se produkt
- Reduceret På lager -50 % Pololu 3,3V step-up spændingsregulator U1V11F3 € 11,65 € 5,80 Se produkt
- Reduceret På lager -50 % Pololu 5V Step-Up/Step-Down spændingsregulator S18V20F5 € 43,75 € 21,90 Se produkt
- Reduceret På lager -50 % Pololu Hjul 32×7mm Par - Hvid € 6,50 € 3,25 Se produkt
- Reduceret På lager -50 % Pololu Båndkabel Premium Jumper Wires 10-farve FF 6" (15 cm) € 4,20 € 2,10 Se produkt
- Reduceret På lager -51 % Pololu Micro Metal Gearmotor Bracket Par - Sort € 4,35 € 2,15 Se produkt
- Reduceret 3 pieces På lager -51 % Pololu Skrueløs klemrække: 3-benet, 0,1" pitch, sideindgang (3-pack) € 3,75 € 1,85 Se produkt
- Reduceret 2 pieces På lager -50 % Pololu Skrueløs terminalblok: 6-benet, 0,1" pitch, topindgang (2-pack) € 4,80 € 2,40 Se produkt
- Reduceret På lager -50 % Pololu Strandet ledning: Rød, 28 AWG, 90 fod € 14,55 € 7,30 Se produkt
- Reduceret På lager -50 % Pololu Strandet ledning: Gul, 26 AWG, 70 fod € 14,55 € 7,30 Se produkt