









Pololu RoboClaw 2x15A motorcontroller (V5E)
Beskrivelse
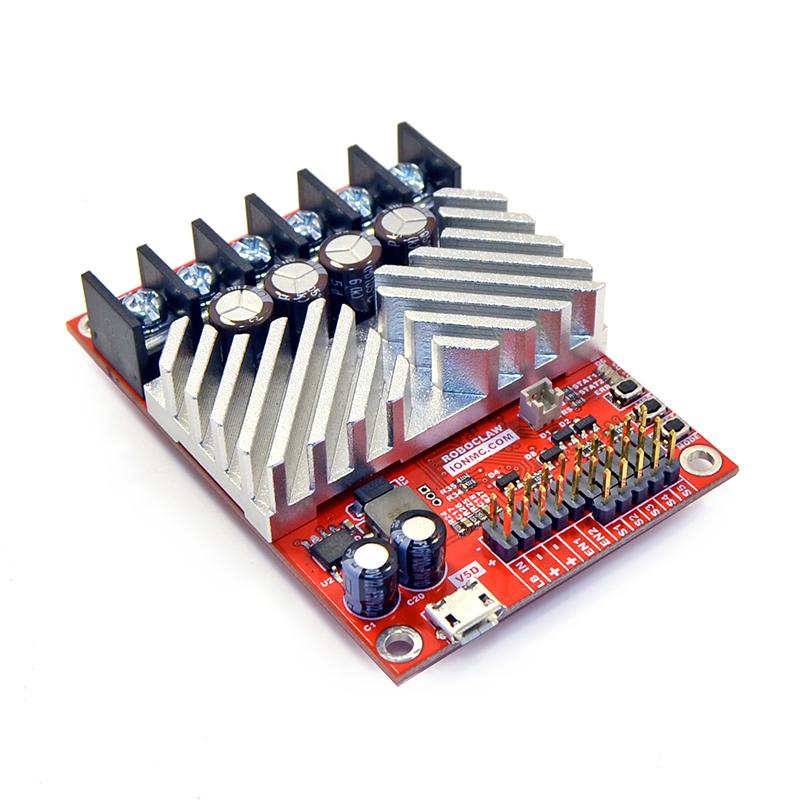
Dette RoboClaw 2x15A (V5D eller V5E) er en lidt forbedret erstatning for 2x15A (V5). Specifikt har V5D en beskyttende plastikplade på bunden og inkluderer en port til valgfri tilslutning af en 5 V, 150 mA køleventilator, som RoboClaw automatisk vil styre baseret på korttemperaturen, og V5E er en mindre ændring i forhold til V5D, der ikke påvirke ydeevnen. Kortstørrelsen er den samme, og placeringen af nøglegrænsefladeelementerne (f.eks. knapper, klemrækker, hovedstifter, USB-stik og monteringshuller) er uændrede, hvilket gør det muligt at bruge denne version som en direkte erstatning for V5 i typiske applikationer .
RoboClaws fra Basicmicro (tidligere Ion Motion Control) er en familie af effektive, alsidige, synkron regenerative motorcontrollere. De kan levere børstede jævnstrømsmotorer med 7,5 A, 15 A, 30 A, 45 A, 60 A eller 120 A kontinuerligt (afhængigt af model) ved spændinger fra 6 V til 34 V eller 10,5 V til 60 V (også afhængigt af model). modellen), og de tillader spidsstrømme et godt stykke over de maksimale kontinuerlige klassifikationer. "Solo"-versionerne har en enkelt motorkontrolkanal, mens de dobbelte versioner (angivet med et "2x" i deres navne) tilbyder to kanaler til styring af et par motorer.
RoboClaws har et USB-interface, der fungerer som en virtuel seriel (COM) port, så den kan styres direkte fra en computer, og de har indbyggede kommandoer til styring af acceleration, deceleration, afstand, hastighed, strømfølelse, spændingsgrænser og mere. Flere andre grænsefladetilstande understøttes også af RoboClaw: den kan styres via TTL seriel til brug med indlejrede systemer, RC hobby servoimpulser til brug som en RC-styret elektronisk hastighedskontrol (ESC) eller analoge spændinger til brug med potentiometre eller analoge joysticks.
RoboClaw understøtter automatisk 3,3V eller 5V logiske niveauer, rejseendestopkontakter, hjemmekontakter, nødstopkontakter, strømforsyninger, bremsesystemer og kontaktorer. Strømforsyninger kan bruges ved at aktivere den indbyggede spændingsspændingskontrolfunktion. En indbygget koblingstilstand BEC leverer 5VDC ved op til 1,2 A eller 3 A (afhængigt af controllermodel) til strømforsyning af brugerenheder.
RoboClaws kan betjenes uden feedback til hastighedskontrol i åben sløjfe, eller de kan bruges med en række forskellige feedbacktyper til hastigheds- eller positionskontrol med lukket sløjfe. Kvadraturkodere med op til 19,6 millioner pulser i sekundet understøttes og kan automatisk tunes ved hjælp af Ion Studio, som er en gratis applikation, der kan downloades. Derudover understøttes en lang række sensorindgange såsom potentiometre og absolutkodere. RoboClaws lukkede sløjfe-funktionalitet skaber absolut kontrol over hastighed og retning uanset belastningsændringer.
RoboClaw inkorporerer flere beskyttelsesfunktioner, herunder temperatur, strøm, overspænding og underspændingsgrænser. Adskillige brugerdefinerbare indstillinger såsom maksimal strømgrænse, maksimum og minimum batterispænding er tilvejebragt for mere raffineret kontrol.
Nøglefunktioner i RoboClaw-familien
Eksempelkode
Basicmicro har skrevet en Arduino-bibliotek til RoboClaw der gør det nemt at forbinde disse motorcontrollere med en Arduino. Biblioteket kommer med flere eksempelskitser, der demonstrerer forskellige metoder til styring af RoboClaw. De har også en ansøgningsnotat der viser, hvordan man bruger deres biblioteker til at styre en RoboClaw med en A-Star 32U4 programmerbar controller.
RoboClaws fra Basicmicro (tidligere Ion Motion Control) er en familie af effektive, alsidige, synkron regenerative motorcontrollere. De kan levere børstede jævnstrømsmotorer med 7,5 A, 15 A, 30 A, 45 A, 60 A eller 120 A kontinuerligt (afhængigt af model) ved spændinger fra 6 V til 34 V eller 10,5 V til 60 V (også afhængigt af model). modellen), og de tillader spidsstrømme et godt stykke over de maksimale kontinuerlige klassifikationer. "Solo"-versionerne har en enkelt motorkontrolkanal, mens de dobbelte versioner (angivet med et "2x" i deres navne) tilbyder to kanaler til styring af et par motorer.
RoboClaws har et USB-interface, der fungerer som en virtuel seriel (COM) port, så den kan styres direkte fra en computer, og de har indbyggede kommandoer til styring af acceleration, deceleration, afstand, hastighed, strømfølelse, spændingsgrænser og mere. Flere andre grænsefladetilstande understøttes også af RoboClaw: den kan styres via TTL seriel til brug med indlejrede systemer, RC hobby servoimpulser til brug som en RC-styret elektronisk hastighedskontrol (ESC) eller analoge spændinger til brug med potentiometre eller analoge joysticks.
RoboClaw understøtter automatisk 3,3V eller 5V logiske niveauer, rejseendestopkontakter, hjemmekontakter, nødstopkontakter, strømforsyninger, bremsesystemer og kontaktorer. Strømforsyninger kan bruges ved at aktivere den indbyggede spændingsspændingskontrolfunktion. En indbygget koblingstilstand BEC leverer 5VDC ved op til 1,2 A eller 3 A (afhængigt af controllermodel) til strømforsyning af brugerenheder.
RoboClaws kan betjenes uden feedback til hastighedskontrol i åben sløjfe, eller de kan bruges med en række forskellige feedbacktyper til hastigheds- eller positionskontrol med lukket sløjfe. Kvadraturkodere med op til 19,6 millioner pulser i sekundet understøttes og kan automatisk tunes ved hjælp af Ion Studio, som er en gratis applikation, der kan downloades. Derudover understøttes en lang række sensorindgange såsom potentiometre og absolutkodere. RoboClaws lukkede sløjfe-funktionalitet skaber absolut kontrol over hastighed og retning uanset belastningsændringer.
RoboClaw inkorporerer flere beskyttelsesfunktioner, herunder temperatur, strøm, overspænding og underspændingsgrænser. Adskillige brugerdefinerbare indstillinger såsom maksimal strømgrænse, maksimum og minimum batterispænding er tilvejebragt for mere raffineret kontrol.
Nøglefunktioner i RoboClaw-familien
- Enkel tovejsstyring af en eller to børstede DC-motorer, afhængigt af controllermodel
- 6 V til 34 V eller 10,5 V til 60 V driftsforsyningsområde, afhængigt af controllermodel
- 7,5 A til 120 A maksimal kontinuerlig strømudgang, afhængig af controllermodel
- To-kanals controllere understøtter kanalbro for at tillade kontrol af en enkelt motor med dobbelt strømkapacitet
- Automatisk strømbegrænsning reducerer driftscyklussen, når temperaturen overstiger 85°C
- Fire kommunikations- eller kontrolmuligheder:
- USB seriel interface (virtuel COM-port)
- Logisk niveau (TTL) serielt interface til direkte forbindelse til mikrocontrollere eller andre indlejrede controllere
- Hobby radiokontrol (RC) pulsbredde interface til direkte tilslutning til en RC modtager el RC servo controller
- Analog spændingsgrænseflade (0 V til 2 V, 5 V tolerant) til direkte forbindelse til potentiometre og analoge joysticks
- Dobbelt feedback-indgange til PID lukket sløjfestyring:
- Hastigheds- eller positionskontrol med kvadraturkodere, op til 19,6 millioner encoderimpulser pr.
- Positionskontrol med analoge indkodere eller potentiometre
- (Åben sløjfe kontrol uden feedback også tilgængelig)
- Skrueklemmer til hurtig til-/frakobling
- Konfigurerbar via trykknap-interface eller USB-forbindelse og pc-software
- Regenerativ bremsning
- Tolererer retningsændringer i høj hastighed
- Jumper-valgbar 5 V BEC
- Batteriovervågning og underspændingsafbrydelse beskytter batterier mod overafladning
Eksempelkode
Basicmicro har skrevet en Arduino-bibliotek til RoboClaw der gør det nemt at forbinde disse motorcontrollere med en Arduino. Biblioteket kommer med flere eksempelskitser, der demonstrerer forskellige metoder til styring af RoboClaw. De har også en ansøgningsnotat der viser, hvordan man bruger deres biblioteker til at styre en RoboClaw med en A-Star 32U4 programmerbar controller.
Ejendomme
Brand information
| Mærke | Pololu |
| Model | 3285 |
€ 148,85€ 118,15 Ekskl. moms (DK)
ETA kendes ikke
Micro USB kabel
Vis flere resultater
 Pololu RoboClaw 2x15A motorcontroller (V5E) € 148,85
Pololu RoboClaw 2x15A motorcontroller (V5E) € 148,85 Alternative produkter
- Pololu RoboClaw 2x60A motorcontroller (V7) € 312,60 Se produkt
- Pololu RoboClaw 2x30A motorcontroller (V5E) € 194,65 Se produkt
- Pololu RoboClaw ST 2x45A motorcontroller (V5E, skrueterminal I/O) € 219,85 Se produkt
- Pololu RoboClaw Solo 30A motorcontroller € 103,15 Se produkt
- Pololu RoboClaw 2x60AHV, 60VDC motorcontroller (V7B) € 426,- Se produkt
- Pololu RoboClaw 2x7A motorcontroller (V5C) € 131,65 Se produkt
- Pololu RoboClaw Solo 60A motorcontroller € 137,40 Se produkt
- Pololu RoboClaw Solo 300A, 60VDC motorcontroller € 572,60 Se produkt
- Pololu RoboClaw 2x45A motorcontroller (V5E, pin header I/O) € 219,85 Se produkt
Relaterede produkter
- På lager Opencircuit Micro USB kabel 50cm blå € 1,55 Se produkt
- På lager Opencircuit Micro USB kabel 100cm blå - 30AWG € 3,35 Se produkt
- Adafruit USB micro B-kabel med lysdioder - blå og rød € 9,20 Se produkt
- Pololu Taske med blæser til RoboClaws 2x15A, 2x30A og 2x45A € 21,70 Se produkt
- Adafruit USB micro B-kabel med lysdioder - blå og grøn € 9,15 Se produkt
- DFRobot Vendbart USB til microUSB 2.0-kabel med antioxidantstik € 4,20 Se produkt
Kundespørgsmål
Q
kunde anmeldelser
Pololu RoboClaw 2x15A motorcontroller (V5E) ★★★★★Klik på en stjerne for at skrive din anmeldelse
- På lager Pololu 5V, 3,4A Step-Down spændingsregulator D30V30F5 € 22,85 Se produkt
- På lager Pololu Logisk niveauskifter, 4-kanals, tovejs € 4,- Se produkt
- På lager Pololu 3,3V step-up spændingsregulator U1V11F3 € 9,10 Se produkt
- På lager Pololu USB 2.0 Type-C Connector Breakout Board € 5,70 Se produkt
- På lager Pololu Skrueklemmeblok: 8-benet, 0,1" pitch, sideindgang € 4,10 Se produkt
- På lager Pololu Step-Up/Step-Down spændingsregulator S7V7F5 € 9,75 Se produkt
- På lager Pololu 3,3V, 2,6A step-down spændingsregulator D24V22F3 € 21,70 Se produkt
- 100 pieces På lager Pololu Hun Crimp Pins til 0,1" huse 100-pak € 13,70 Se produkt
- 100 pieces På lager Pololu Han Crimp Pins til 0,1" huse 100-pak € 20,60 Se produkt
- På lager Pololu Nylonafstandsstykke: 10 mm længde, 4 mm OD, 2,7 mm ID (25-pak) € 3,- Se produkt
- På lager Pololu 9V, 600mA step-down spændingsregulator D24V6F9 € 12,55 Se produkt
- På lager Pololu Mini MOSFET-skydekontakt med omvendt spændingsbeskyttelse, LV € 5,15 Se produkt
- På lager Pololu Strandet ledning: Blå, 22 AWG, 50 fod € 12,55 Se produkt
- På lager Pololu 6-benet hun-hun JST SH-stil kabel 63cm € 6,85 Se produkt
- På lager Pololu 9,7:1 Metal Gearmotor 25Dx48L mm HK 12V € 43,50 Se produkt